Image: Curved Metal Workpiece After Mirror Polishing
The mirror polishing process aims to create a highly reflective, smooth surface, demanding exceptionally high flatness. Any minute imperfection will become glaringly apparent on the mirror finish. Taking stainless steel as an example: a surface can only be deemed a true “mirror finish” if its roughness value Ra is ≤ 0.16μm and its surface finish exceeds Grade 12.
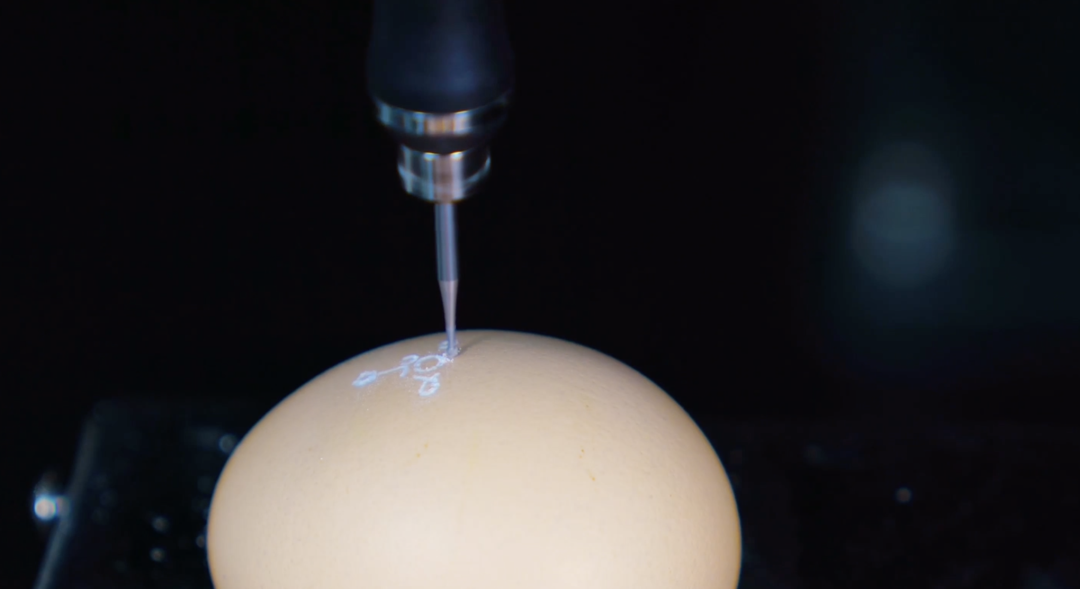
Traditional robotic polishing often struggles to precisely control the magnitude and direction of applied force, frequently resulting in surface defects and uneven polishing outcomes. The breakthrough in Tendo Robot’s force control technology has fundamentally altered this landscape.
The force control technology employed by the Tendo EVO robot utilizes advanced six-dimensional force sensors and Tendo’s proprietary Fusion control system to monitor and adjust the robot’s applied force in real time. Notably, the Fusion control system approaches challenges from a process-oriented perspective. By configuring built-in parameters such as polishing pressure, operational speed, acceleration, and current, it assists customers in digitizing their processes for direct application in production. This ensures that the force exerted on the product surface during polishing remains optimal across multiple dimensions. Furthermore, in polishing applications, it achieves force control precision within 0.5N, delivering more accurate and consistent polishing results.
The Encounter Is Not the Destination
At the intersection of technology and artistry, the force control technology demonstrated by Tendo Robot is not only applicable to curved surface mirror polishing but also represents a deeper exploration into process-driven solutions. As Tendo’s technology continues to break new ground and evolve, the future of Tendo Robot will advance toward even greater intelligence and efficiency.